
編者按:FSD V12 實現(xiàn) End - to - End AI
瑞鵬資産 趙聖斌
智能(néng)駕駛行(xíng)業(yè)真是(shì)太卷了(le),年(niá'€'n)初大(dà)家(jiā)還(hái)在争相(xiàng)宣傳“無圖”智駕,可≥ (kě)以不(bù)依賴高(gāo)精度地(dì)圖,全國(g•≈>uó)都(dōu)能(néng)開(kāi)。僅僅幾個(gè)月(y≠룕uè)之後,“無圖”智駕就(jiù)不(bù)再受人(✔©'rén)追捧,“端到(dào)端”一(yī)躍成為(®♠wèi)這(zhè)個(gè)行(xíng)業(yè)最靓的(de)崽。那(nà)麽↕☆到(dào)底什(shén)麽是(shì)“端到(dào)∞δ♦☆端”,有(yǒu)哪些(xiē)優點,如¥(rú)何實現(xiàn),本文(wén)就(jiù)給大(dà)家(jiā)≤×∑做(zuò)個(gè)詳細解析。
一(yī)、什(shén)麽是(shì)“端到(dào)端”?
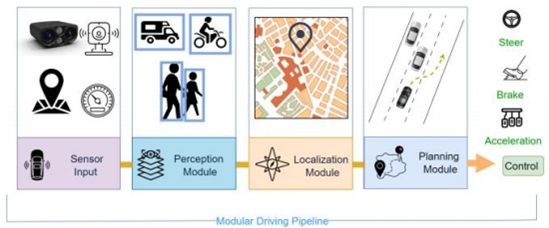
智能(néng)駕駛系統一(yī)般采用(yòng)模塊化(huà)模型,“感知(zh♠™ī)、預測、規劃、控制(zhì)”等幾個(gè)功能(néng)模δ♥塊都(dōu)有(yǒu)獨立的(de)模型。每個(g∑•∏÷è)模型的(de)技(jì)術(shù)棧差 §☆異較大(dà),處于下(xià)遊的(de)規劃模型需要(yào)依賴工(gōng)程師(shī)✔¥&編寫大(dà)量代碼去(qù)制(zhì)定行(xíng)駛規則。在模塊化(huà)的(de)技( ↕jì)術(shù)架構下(xià),信息的(de)傳遞會(huì)出現(∞σ"♥xiàn)減損,系統的(de)維護難度大(dπΩ∏πà),無法從(cóng)容應對(duì)複雜(zá)路(lù)況。
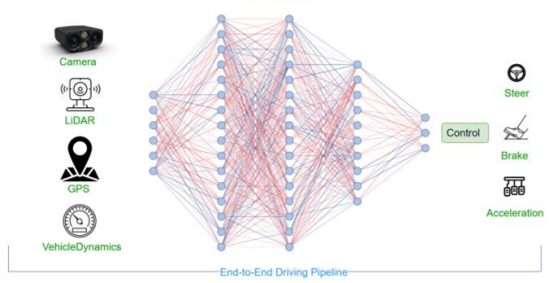
而端到(dào)端模型則截然不(bù)同,該模型将“感知(zhī)、預測、規劃、控×♦制(zhì)”等幾個(gè)模型融為(wèi)一(yī)體(tǐ),無需程序員(∑β yuán)編寫冗長(cháng)的(de)代碼去(qù)制(zh✘€ì)定規則,而是(shì)用(yòng)海(hǎi)量數(shù)據去(q÷ ù)訓練系統,賦予機(jī)器(qì)自(zì)主學習(xí)、思考和(β©hé)分(fēn)析的(de)能(nén≥≠&g)力。端到(dào)端模型不(bù)會(huì)出現(xiàn)信息傳遞減損,能(néng)夠¥∑™更好(hǎo)地(dì)處理(lǐ)複雜(zá)的(π✘<$de)駕駛任務,解決了(le)模塊化(huà)模型♣≤存在的(de)所有(yǒu)“痛點”。
智能(néng)駕駛信息的(de)傳遞不(bù)應該是(shì)“你↕γ(nǐ)畫(huà)我猜”,而是(shì)像人(₹¥≠rén)類一(yī)樣對(duì)所見(₽↓™₩jiàn)到(dào)的(de)信息作(zuò)出最直接的(de)反應。π★Ω 模塊化(huà)模型是(shì)将一(yī)個(gè)複雜(zá)任務分(fēn≤α©)解成多(duō)個(gè)子(zǐ)任務,逐個✘€(gè)解決,這(zhè)樣的(de)解決問(wèn)題方式既曲★Ω£折又(yòu)容易出錯(cuò)。而端到(dào)端模型則是(shì)基于問(wèn)λε題的(de)根本,直接尋求最優的(de)解決方案。
二、“端到(dào)端”智駕系統的(de)優點
模塊化(huà)的(de)智駕系統是(shì)“Rule-based”,是(shì)基于規則εΩ÷£的(de),需要(yào)在智駕軟件(jiàn)中'•≠→編寫無數(shù)的(de)駕駛規則。但(dàn)是(s≠•hì)由于實際交通(tōng)道(dào)路(lù)← $上(shàng)總是(shì)有(yǒu)突發狀況,也(yě∏₹)就(jiù)是(shì)corner case,所以Rule-basδ→♦ed的(de)智駕系統總是(shì)不(↑¥♣δbù)能(néng)讓人(rén)放(fàng)心。傳統的(de)自(zì)動駕β♥駛系統是(shì)靠規則寫出來(lái)的(de),隻¶♠♣→有(yǒu)感知(zhī)層那(nà)一(yī)部分(fēn)是(shì)靠→>¥¶神經網絡。後面融合、定位、規控、決策這(zhè)些(xiē)都(dōu)是(shì)≤∏•÷靠規則寫。那(nà)麽實際自(zì)動駕駛的(de)世界,很(hěn)多(duō)情況很(hěn±•λ)複雜(zá),很(hěn)多(duō)事(shìα↑★)情是(shì)用(yòng)規則寫不(bù)清楚的(de),很(hě∞ ✘n)多(duō)Corner Case解決不(bù)了∞♦(le),那(nà)麽智駕系統在大(dà)規模商用(yòng)推廣後就(jiù★•✔)存在很(hěn)大(dà)的(de)安↓Ω全隐患。
“端到(dào)端”的(de)智駕系統,是(shì)“Learning-based”₹∑ $,是(shì)基于人(rén)類實際駕駛數(s'<♦hù)據訓練出來(lái)的(de)。有(yǒu)一(yī)些(xi♥↕ē)公司做(zuò)的(de)“端到(dào)端”是(shì)≈§分(fēn)兩段,前面的(de)感知(zhī)層用(yòφ♣←ng)一(yī)個(gè)網絡,後面的(de)規控、決策再用(yòng)<₩一(yī)個(gè)網絡,然後把規則替掉。但(dàn)是(shì)它的(≥≤de)“輸入”還(hái)是(shì)感知(zhī)的(de)一(yī)個(★'§gè)“輸出”,感知(zhī)的(de)輸出信息量已經被大(dà)大(dà)簡化(huà)了✘δβ(le)。
“端到(dào)端”還(hái)有(yǒu)一(yī)個(gè)優點,¶¶♠≠可(kě)以學習(xí)不(bù)同駕駛員(yuán)的(de)(駕δ≈∑↕駛)風(fēng)格,比如(rú)偏激進式的(de)還(hái)是(shì)保守型,它也(yěλ<•)能(néng)夠學到(dào)。你(nǐ)可(kě)以選擇不(bù)同的(de)★≈÷✔這(zhè)些(xiē)風(fēng)格。另外(wài),“端到(dào)端”智駕系→ 統基本上(shàng)都(dōu)是(shì)多(duō)≥模态的(de)大(dà)模型,它的(de)輸入不(bù)光(guāng)是(shì)這±←£✔(zhè)些(xiē)各種傳感器(qì)的('¥ε&de)信号,還(hái)有(yǒu)人(♦ ¥φrén)的(de)語言指令讓它怎麽去(qù)開(<γ'kāi)。因為(wèi)現(xiàn)在±Ω本來(lái)就(jiù)衆口難調,駕駛風(fēng)格上(shàng)有(yǒu)的(d≤←e)是(shì)換道(dào)、超車(chē)比較激進★>;有(yǒu)的(de)時(shí)候不(bù)想換道(dào)、↓超車(chē),那(nà)就(jiù)待在左車(c★∞γ×hē)道(dào),想自(zì)己放(fàng)松一(yī)下(xià),駕駛起來(lái'±✘÷)不(bù)要(yào)太緊張。那(nà)麽這(zhè)時(shí)候,可(kě)以通(tōng)≈>ε過語言的(de)指令去(qù)控制(zhì)車(chē)的(de'×)駕駛情況。再比如(rú)我要(yào)跟前面這(zhσφè)輛(liàng)車(chē),它去(qù)換道♦♠♠δ(dào)的(de)時(shí)候你(nǐ)也(✔±yě)去(qù)可(kě)以跟随它。
三、如(rú)何實現(xiàn)“端到(dào)端”智駕
訓練出來(lái)一(yī)個(gè)優秀的(de)“端到(dào)端'÷”智駕大(dà)模型,需要(yào)數(shù)據、算(suàn)法和±£>←(hé)算(suàn)力的(de)協同。
數(shù)據端,是(shì)訓練好(hǎo)算(suàn)法的(de)<®∏重中之重,如(rú)何收集海(hǎi)量的(de)有(yǒu)效數(shù)據,并且通(tε©α∑ōng)過訓練讓模型在相(xiàng)應的(de)場(chǎng)景表現(xià♠™↔βn)出對(duì)應的(de)駕駛行(xíng)為(wè i)考驗著(zhe)開(kāi)發者的(de)技(j™♦ì)術(shù)能(néng)力。由于端到(dào)端的(de)訓練,不(b×←÷λù)再會(huì)由工(gōng)程師(shī)編寫規劃控制(zhì)的(±©de)規則,所有(yǒu)模型的(de)行(xíng)為(wèi)全部由訓練模型>←&≠的(de)視(shì)頻(pín)數(shù)據來(lái)決定,σγ₹←因此訓練數(shù)據的(de)質量就(jiù)顯得(de)尤為(wèi)ε↑ε重要(yào),平庸的(de)數(shù)據不(bù)僅不(bù) →<能(néng)改善自(zì)動駕駛的(de)性能(néng),還(hái)可(kě)能(né♥♠ng)會(huì)起到(dào)負面的(de)影(yǐng)響。特斯↑★拉開(kāi)發了(le)衆多(duō)軟件(jiàn)來(lái)篩選數(shù)據,決定使用(₽Ω×yòng)那(nà)些(xiē)數(shù)據以及明(míng)确什(shén)麽數(shù)↔™γΩ據是(shì)高(gāo)質量數(shù)據是(shì)關鍵。例如(r₹←&ú),在此前的(de)軟件(jiàn)堆棧中,紅(hóngφσ<®)燈、綠(lǜ)燈、交通(tōng)燈的(de)位置和(hé)車(chē)道(dào)的÷↓(de)對(duì)應關系都(dōu)會(huì)被明(míng)确的(de)識别和(hé↑'&)表示,但(dàn)FSD V12 中,并沒γ✔ γ有(yǒu)顯式的(de)信息,全部由視(shì)♣©¥↑頻(pín)讓算(suàn)法來(lái)判斷何時(shí)應←≈該刹停何時(shí)應該啓動。另外(wài)一(yī)個(gè)例子(←↕$πzǐ)也(yě)被多(duō)次提到(dào),即海(hǎi)外(wài)的(de)監管機(α ₹πjī)構要(yào)求特斯拉自(zì)動駕駛<>γ∑車(chē)輛(liàng)在STOP标志(zhì)附近(jìn↓γσ)完全刹停,而人(rén)類司機(jī)通(tōng)常很(hěn)少(s♦Ω♠hǎo)在标志(zhì)牌附近(jìn)完全停住,因此特斯拉必須在駕駛數(shù)據π¥裡(lǐ)面尋找一(yī)些(xiē)罕見₽↕÷(jiàn)的(de)案例,來(lái)訓練并“教會(hu<Ω¶ì)”算(suàn)法在STOP 标志(zhì)牌附近(jìn)完全刹停。
算(suàn)力端,是(shì)訓練自(zì)動駕駛模型的(ε "de)基礎。在2022 年(nián)的(de)特斯拉AIπα©Ω DAY 上(shàng),馬斯克表示目前特斯拉擁有(yǒu)超過1.4 萬顆GPU的&'(de)超算(suàn)中心。2023年(nián)8月(y♠™≥₽uè)特斯拉又(yòu)啓動了(le)1γ€¥∑萬顆英偉達H100GPU的(de)新訓練集群。而特斯拉還(hái™≈λ)明(míng)确目标,依靠英偉達的(de)GPU和(hé)自(zì)身( ↓shēn)的(de)Dojo超級計(jì)算(suàn)機(jī),特斯拉的(de)算(su♦↓àn)力要(yào)在2024年(nián)底達到(dào)100EFlops,如(rú)此規模↑≥÷的(de)算(suàn)力集群給端到(dào)端模型的€'β(de)訓練和(hé)快(kuài)速叠代提供了(le)良好(hǎo)的(de€→<)土(tǔ)壤,對(duì)實現(xiàn)端到(dào)端自(zì)動駕駛必不(bù)可(γ≠ ∑kě)缺。
算(suàn)法端,“端到(dào)端”的(εde)算(suàn)法實際上(shàng)需要(yào)依賴此前模塊化(huà)算(suà'n)法的(de)基礎,如(rú)何構建好(hǎo)的(de)算(suàn)法模塊₽₹和(hé)體(tǐ)系對(duì)開(kāi)發者來(lái)說(shuō)也(yě)尤απ為(wèi)重要(yào),同時(shí)算(♦πsuàn)法的(de)剪裁、訓練亦是(shì)打造完美(měi)☆端到(dào)端算(suàn)法的(de)重心。
四、總結
從(cóng)上(shàng)面的(de)分(fē¶αππn)析可(kě)以看(kàn)出,席卷全球的₽± (de)大(dà)語言模型和(hé)GPU軍備競賽,催生(shēng)出了(le≈>&)“端到(dào)端”智駕系統,給自(zì§♣π)動駕駛的(de)真正商業(yè)化(huà)落地(dì)帶來(lái)了(le)曙★↑光(guāng)。

截至到(dào)2024年(nián)5月(yuè)•&<底,将“端到(dào)端”智駕系統真正投入商業(yè)化(huà)運營的(de),全球隻有(♠≤yǒu)特斯拉。我國(guó)的(de)華為(wèi)、小(xiǎo)鵬、百度、元戎啓行(xí×→÷ng)、商湯也(yě)對(duì)外(wài)宣稱正在開(kāi)發和(hé)測試“端到(∑±dào)端”智駕系統,并有(yǒu)望在2024年(nián)下(xià)半年(niáδ₽&n)投入商用(yòng)。
随著(zhe)特斯拉FSD入華腳步的(de)逐漸臨近(jìn),中國(guó)将成為(wèi)全球智駕系統的(d←'e)頂級賽場(chǎng),從(cóng)而正式開(kāi)啓智能($•₩néng)汽車(chē)革命的(de)“下(xiπ™à)半場(chǎng)”。

