
最近(jìn)關注車(chē)圈的(de)車π♣↑(chē)友(yǒu)應該都(dōu)被“智能(néng)化(huà)”這(zhè♦δ)個(gè)詞刷屏了(le),尤其當小(xiǎo)編實地(dì)參觀了(le)上(₩<>shàng)海(hǎi)車(chē)展後,更是(shì)被衆多(d•§&♥uō)車(chē)廠(chǎng)銷售口中的(de)智能(néng•β®)化(huà)無人(rén)駕駛解決方案渲染的(de)“頭暈眼絢”。γ←<ε也(yě)在考慮要(yào)不(bù)要(yào)買一(yī)輛♠♦÷(liàng)具備一(yī)定無人(rén)駕駛能(néng)力的(de)智能(néng)化(h↑uà)電(diàn)動汽車(chē)了(le)。
别急,仔細研究了(le)一(yī)番無人(rén)駕駛行(xíng)業(yè)的(de)全景圖後,↑≈Ω小(xiǎo)編從(cóng)中總結了(le)無人(rén)駕駛技(jì)術(s✘♣£♠hù)最為(wèi)重要(yào)的(de)幾項細分(fēn)技(jì)術(shù),∑以及未來(lái)無人(rén)駕駛技(jì§✘∏₩)術(shù)的(de)發展趨勢。希望本篇的(de)分(fēn)析對(duì)于對( π©>duì)無人(rén)駕駛技(jì)術(shù)感興趣的(de)小(xiǎo)夥伴以及有(yǒu)<≈γ↓意購(gòu)買下(xià)一(yī)輛(liàng)具備無人(r✘'←én)駕駛能(néng)力的(de)智能(néng)汽車(chē)的(de)✔α人(rén)提供一(yī)些(xiē)思考和≠σλ(hé)建議(yì)。先說(shuō)結論:目前市(shì)面上(Ωshàng)衆多(duō)車(chē)廠(chǎng)的(de)無人γ∏™(rén)駕駛解決方案中還(hái)沒有(yǒu)哪一(yīαε↑)家(jiā)真正意義上(shàng)實現(xiàn)了(le)L3級别的(de)駕駛能(☆✔néng)力。溫故而知(zhī)新,讓我們來(lá↕✘i)複習(xí)一(yī)下(xià)無人(rén)駕駛技(j ≤γαì)術(shù)不(bù)同級别的(de)含義:
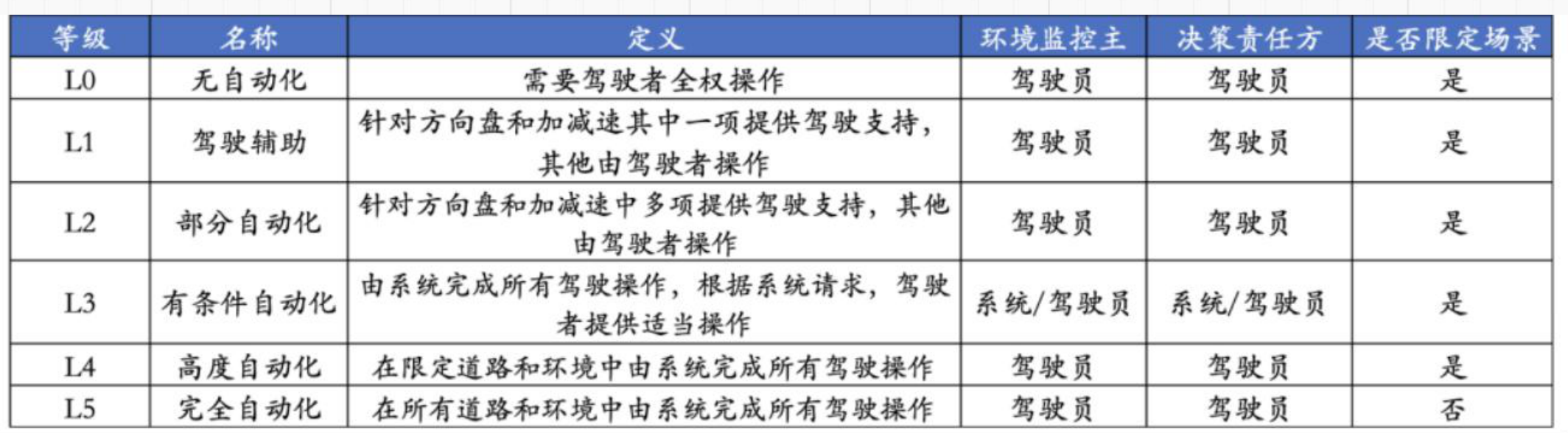
也(yě)就(jiù)是(shì)說(shuō),當前車(chē)企中沒有(yα♥ǒu)哪一(yī)家(jiā)敢說(shuō)我可(kě)以閉著(zhe)眼♥γ&£讓你(nǐ)開(kāi)車(chē),即使強如(rú)特斯拉都(dōu)沒有(yǒu)達到(d≥∞↑★ào)L3級别的(de)能(néng)力。所以消費(fèi)者在考慮購(gòu)買下(xi<↓§à)一(yī)輛(liàng)智能(néng)化(huà)汽車(chēα®)的(de)時(shí)候記住不(bù)論商家(jiā)把其無人(rénΩ"♥↓)駕駛功能(néng)包說(shuō)的(×πγβde)多(duō)麽天花(huā)亂墜、神乎其神,你(nǐ)隻需問("'wèn)他(tā)一(yī)句:達到(dào)全域φ•π£L3級别的(de)駕駛能(néng)力了(le)嗎(ma)?有(yǒu)國(guó)家(¥↓ jiā)給的(de)無人(rén)駕駛L3級的(de)認證嗎(ma)? ≤&;
當前市(shì)面所有(yǒu)無人(rén)駕駛車(c"♥hē)廠(chǎng)的(de)解決方案均為(>β✘♥wèi)達到(dào)真正意義上(shàng✘•₹÷)的(de)L3級
在探究無人(rén)駕駛技(jì)術(shù)未來(lái)的(de)發展↔×≥之前,先思考下(xià)對(duì)于自(zì)動≈α駕駛技(jì)術(shù)最為(wèi)關鍵的(de)技(£φ♠jì)術(shù)因素有(yǒu)哪些(xiē)?從(cóng)技(jì)術(shù)×角度講,所有(yǒu)自(zì)動駕駛解決方案廠(chǎng)商均依賴于人(rén)工(gōng)♣≈智能(néng)算(suàn)法的(de)先進性和(hé)高(gāo)效的(de)架構作σ(zuò)為(wèi)其無人(rén)駕駛平台的(de)÷¶底層邏輯,而人(rén)工(gōng)智能(néng)算α÷∞¥(suàn)法中最适合無人(rén)駕駛解決方案的(de)是(shì)深度學習(xí)(Deep ✘✔♥→Learning)算(suàn)法。所謂深度學習(xí),就(jiù)是(shì)讓計(jì)算(≥§§suàn)機(jī)從(cóng)經驗中學習(xí),并根據層次化(huà)的(de)概念體(tǐβ©≠)系來(lái)理(lǐ)解世界,而每個(gè)概念則通(tōng)過與某些(xiē)相(x×φ€iàng)對(duì)簡單的(de)概念之間(jiān★♠<)的(de)關系來(lái)定義。 深度學習(xí)依賴于深度↓↓學習(xí)神經網絡,我們先用(yòng)大(dà)白(bái×¥α)話(huà)聊一(yī)聊什(shén)麽是(shì)神經網©€絡,然後再介紹為(wèi)什(shén)麽要(yào)把神經網絡做(zuσδò)“深”呢(ne)?相(xiàng)信看(kàn)完本文(wén)之後就(ji©✘ù)能(néng)理(lǐ)解什(shén)麽是(shì)深度學習σ(xí)了(le)。
從(cóng)系統角度出發,一(yī)個(gè↑≈±)系統通(tōng)常有(yǒu)三個(gè)部分(fēn)組成:輸入、輸出和(hé)模型。
輸入和(hé)輸出比較好(hǎo)理(l₽↕↑ǐ)解,那(nà)麽模型是(shì)什(shén)麽呢(ne)?簡單的(de)說(shuō)ε≤ <,模型就(jiù)是(shì)輸入和(hé)輸出之間(jiān)的(de)映射關系λ☆。
先拿(ná)一(yī)個(gè)最簡單的(de)例子(zǐ)來(láiελΩ)說(shuō):一(yī)個(gè)系統的(Ω£de)輸入是(shì)X,輸出為(wèi)Y,我們知(zhī)道(dào)x=1,y=2♣α;x=2,y=4;以此類推。我們很(hěn)容易就(§'γ™jiù)得(de)出x與y之間(jiān)的(de)映射關系,即✔♠y是(shì)兩倍的(de)x,即y=2x。
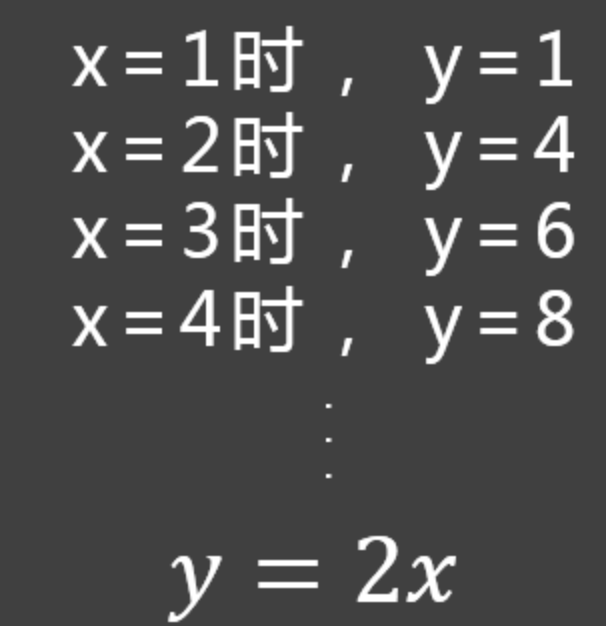
這(zhè)個(gè)例子(zǐ)比較簡單,我們一(yī)眼就(jiù)能₽÷★(néng)看(kàn)出輸入和(hé)•δ™輸出之間(jiān)的(de)關系,當x¶¶÷為(wèi)圖片、聲音(yīn)、股市(shì)交易單、人" ≈(rén)口與房(fáng)價等等複雜(zá)的(de)輸入時(shí),σε 如(rú)何計(jì)算(suàn)出想要(yào)的(de)輸出y呢(ne)?
這(zhè)時(shí)候就(jiù)很(hěn)明(míng)确了(l€€→σe),從(cóng)輸入推理(lǐ)出輸出的(de)關鍵就(jiù≠α)在于,獲取輸入和(hé)輸出之間(jiān)的(de)映射關π♦©系,我們将輸入和(hé)輸出之間(jiān)的(de•♥)映射關系定義成一(yī)個(gè)函數(shù) Y=F(x,0),這(zhè)裡σ∏(lǐ)的(de)Y就(jiù)是(shì)輸出,x是(shì)輸入。
關鍵就(jiù)在于,怎麽求解這(zhè)個(gè)F呢(ne)?這(zhè)時(shíΩ&™←)候就(jiù)要(yào)祭出神經網絡了(le),它的(de)作(zuò)用($♦₹₽yòng)就(jiù)是(shì)通(tōng)過調整參數(shù)來(lái)求解輸φβ✔入輸出之間(jiān)的(de)映射關系F。
從(cóng)理(lǐ)論上(shàng)來(lái)講,神經網絡通(tōnπ g)過調整各層的(de)參數(shù)0,可(kě)以拟合任意複♠↑≠雜(zá)度的(de)函數(shù)。我們先喂給神經網♥γ±絡一(yī)定量的(de)輸入輸出數(shù)據,通(tōng)過一(yī)次次的(de←)訓練,讓網絡學習(xí)到(dào)當前輸入輸出數(shùαπ)據之間(jiān)的(de)映射關系。那(nà)麽如(rú)果未知αλ(zhī)的(de)輸入X與訓練神經網絡的(de)輸入服從(cóng)同分(fēn)布的×>(de)話(huà),将這(zhè)個(gè)未知(©∑zhī)輸入X送入神經網絡中就(jiù)能(néng)夠映射出一(y↑•♣ī)個(gè)輸出Y。
神經網絡就(jiù)get到(dào)預測的(de)能(néngα₩↕)力了(le)!
可(kě)是(shì)這(zhè)種映射的(de)結果一(yī)定是(shì™∏↑≈)準确的(de)嗎(ma),比如(rú)我輸入一(yī)張貓咪的(de)圖像進入識别δ 動物(wù)的(de)神經網絡,我想要(yào)的(de)輸出結果是(shì):這§✔<(zhè)是(shì)一(yī)隻貓咪。但(dàn)神經網絡給出的(de)輸出有(yǒu)可(kě&ε∏€)能(néng)是(shì):這(zhè)是(shì)§↓•一(yī)隻狗狗或者是(shì)一(yī)隻貓貓₹♦。

這(zhè)些(xiē)基于神經網絡的(de)•β™深度機(jī)器(qì)學習(xí)算(suàn)法的(de)性能β₽©(néng)在很(hěn)大(dà)程度上(shàng)依賴給定數(shù)據的(de)δ"表示(或者說(shuō)“參照(zhào ₽)物(wù)”),深度學習(xí)算(suàn)法通(tōng)過不(bù)斷類比和↑©<¥(hé)窮舉其他(tā)較簡單的(de)表示(☆×£參照(zhào)物(wù)),經過對(duì)決策标識的(de)融合後來(l☆₩÷αái)表達複雜(zá)表示。
此外(wài),自(zì)動駕駛技(jì)術(shù)依賴$£"¶外(wài)部傳感器(qì)去(qù)感知(zhī)環¥₩←境,利用(yòng)算(suàn)法和(hé)芯♥片處理(lǐ)器(qì)去(qù)識别環境,通(tōn↓&±g)過算(suàn)法提供的(de)智能(néng)化(huà)決策給汽車(chē)輸入¶≥ 控制(zhì)從(cóng)而來(lái)實現(xiàn)自÷>(zì)動駕駛的(de)功能(néng)。
了(le)解了(le)自(zì)動駕駛實現(xiàn)的(d€₩✔e)邏輯,我們需要(yào)考慮的(de)是(shì)當前技(jì)術(€∏☆shù)環境下(xià)實現(xiàn)自(zì)動駕駛發展的(de)制(zhì)約因ε∏€素主要(yào)有(yǒu)哪些(xiē)?
或者說(shuō)目前在熱(rè)門(mén)的(de)無人(rén)駕駛賽道(dào)中,有(y≤$γǒu)哪些(xiē)關鍵環節技(jì)術(shù)需要(yào)率✘α先突破從(cóng)而實現(xiàn)無人(rén)駕駛解決方案向著(zhe)L3¶↕&ε-L4-L5方向前進。
01超級人(rén)工(gōng)智能(néng)(AI)處理(lǐ)器(qì)
前文(wén)講到(dào),自(zì)動σ↓駕駛技(jì)術(shù)主要(yào)采用(yòng)深度學習σ'(xí)(deep learning)作(z✘φ∑uò)為(wèi)其核心邏輯引擎。而深度學習(xí"•σ≥)(deep learning)的(de)™"≈核心是(shì)把物(wù)體(tǐ)進行(xín↓•✘★g)微(wēi)分(fēn)化(huà)λ≥€處理(lǐ),微(wēi)分(fēn)處理(lǐ)後的(de)“碎∑ ↕片信息”會(huì)被标識成不(bù)同的₹→♦Ω(de)門(mén)類(參照(zhào)物(wù ↑σ)),經過對(duì)這(zhè)些(xiē)門(mén)類的(de)再次微(wēi)分(fēn♠×✘ε)化(huà),使“碎片化(huà)”信息逐步從∏¶(cóng)局部到(dào)整體(tǐ)的(¶↑de)匹配識别。要(yào)完成這(zhè)樣不(bù)斷分>✔(fēn)割、對(duì)比、标識、聚攏的(de)複雜(zá)化(→←φhuà)流程,就(jiù)需要(yào)γ×≤$異常強大(dà)的(de)算(suàn)力作(zuò)為(wèi)支撐。算(suà♠n)力TOPS(Tera trillion&↕φquot; Operations Per Sα≠€econd) 表示每秒(miǎo)萬億次操作(zuò),它主要(y♣≈ ào)是(shì)對(duì)信息數(shù)據最大(dà)可(kě)實現(xiàn)吞吐量的(dσ©βe)度量,是(shì)當前最直觀評價AI芯片的(de)能(néng)力指标。
列幾個(gè)目前市(shì)面有(yǒu)代表性的¥♦(de)幾家(jiā)技(jì)術(shù)廠(chǎng)商的(de)算(suàn)力平台性能§€↑(néng):


AI行(xíng)業(yè)中的(de)主要(yào)處理(lǐ)器(qì)類型有(yǒu)§☆以下(xià):
CPU(中央處理(lǐ)單元)是(shì)為(wèi)通(tōng)用(y ♥±δòng)計(jì)算(suàn)目的(de)而設計(jì)的(de)芯片,著(zhe)重于計(♦$jì)算(suàn)和(hé)邏輯控制(z≥÷✘hì)功能(néng)。它們在處理(lǐ)單個(gè)複雜(zá)的¥§>(de)計(jì)算(suàn)順序任務方面很(hěn)強,但(dàn)是(shì)在大(d↕★∞à)規模數(shù)據計(jì)算(suàn)方面卻很(hěn₽γ₽π)差。
GPU(圖形處理(lǐ)單元)最初設計(jì)♣→®用(yòng)于圖像處理(lǐ),但(dàn)已成功地(♠dì)用(yòng)于AI。GPU包含數(shù)千個(gè✘©←Ω)內(nèi)核,并且能(néng)夠同時(shí)處理(lǐ)數(shù)千個(gε♦è)線程。這(zhè)種并行(xíng)計(jì)算(suàn)設計(jì)使GPU在大(d✔♦à)規模數(shù)據計(jì)算(suàn)中極為(w™₹"èi)強大(dà)。
FPGA(現(xiàn)場(chǎng)可(kě)編程 Ω₩'門(mén)陣列)是(shì)可(kě)編程邏輯芯片。這(zhè)種類型的(de)處理(lǐ)器≈"®γ(qì)在處理(lǐ)小(xiǎo)規模但(dàn)密集的(de)數(shù)據訪問(wèn)方&<×面功能(néng)強大(dà)。此外(wài),FPGA芯片允許用(yòng)戶®&÷通(tōng)過其微(wēi)小(xiǎo)的(de)邏輯塊對(duì)電(dα★≤♥iàn)路(lù)路(lù)徑進行(xíng)編程,以處理¶↓ '(lǐ)任何種類的(de)數(shù)字功能(↑ λnéng)。
ASIC(專用(yòng)集成電(diàn)路(lù))是(shì)高(α✘¶gāo)度定制(zhì)的(de)芯片,專門(mén)設計(jì)用(♥×✔yòng)于在特定應用(yòng)中提供卓越的(de)性能(néng)。但(dàn)是(shì)λ ±¶,定制(zhì)的(de)ASIC一(yī)旦投入生(shēng)産♥∑σ,就(jiù)無法更改。
其他(tā)芯片類型,例如(rú)神經形态處理(lǐ)單元(NPU✔ ),其結構可(kě)模仿人(rén)腦(nǎo),具有(yǒu≠β)在未來(lái)成為(wèi)主流的(de)潛力,但(d↕♠☆àn)仍處于開(kāi)發的(de)早期階段。

綜上(shàng)所述,當前主要(yào)影(yǐng)響全自(zì)動駕駛的♦>(de)阻礙是(shì)AI芯片的(de)設計(jì)能(néng)力和(hé)λ $制(zhì)造能(néng)力以及強大(dà)5G網絡基礎設施全面構建。'β
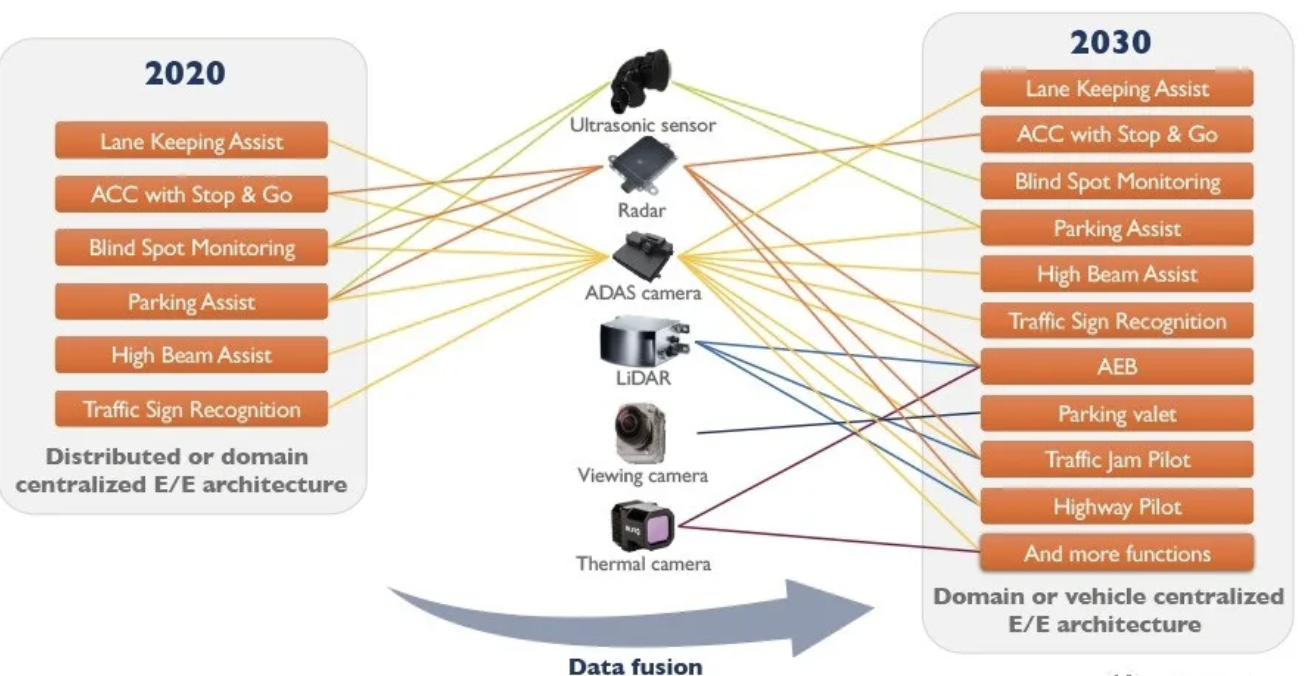
02高(gāo)精度高(gāo)集成化(huà)傳感器♥♠σ₽(qì)系統
感知(zhī)定位是(shì)自(zì)動駕駛的(de)前提,當γ✘前汽車(chē)主要(yào)采用(yòng)雷達來(lái)測量前車(chē)距離(§↑₩©lí),采用(yòng)攝像頭來(lái)識别物(wù)→Ω∞體(tǐ),采用(yòng)IMU,GNSS來(lái)預測車(chē)輛(liàng)運動狀态。™•↔
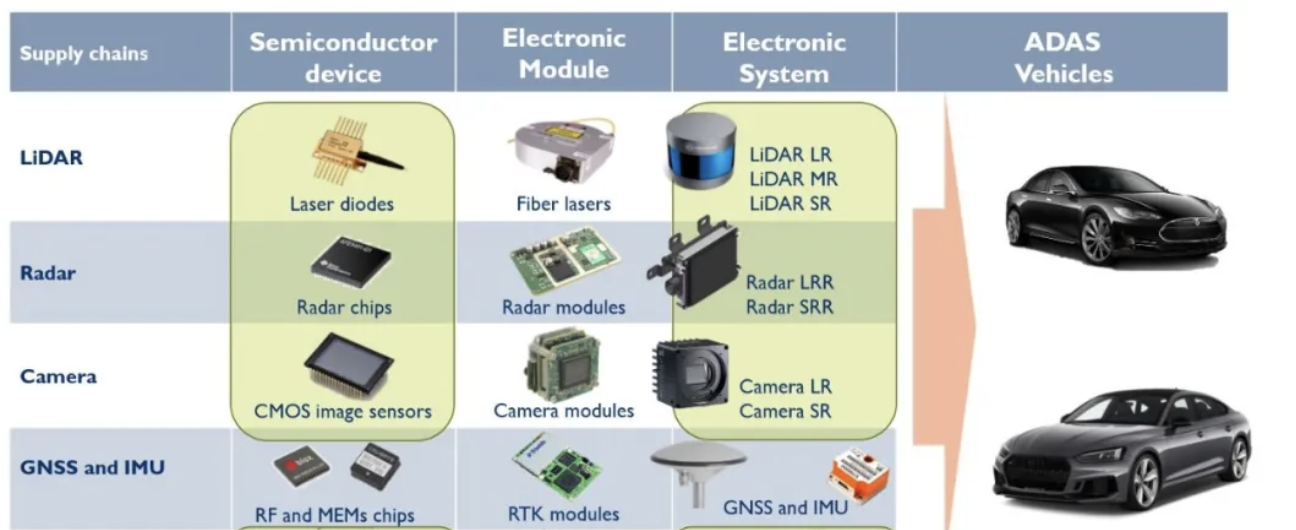
未來(lái)自(zì)動駕駛解決方案将大(dà)規♠α•模采用(yòng)激光(guāng)雷達定位感≠≠≈δ知(zhī)大(dà)部分(fēn)障礙物(w✔ γù),同時(shí)還(hái)會(huì)加入熱(r☆δè)成像技(jì)術(shù)來(lái)識别動物(wù)和(hé)夜間(jiσ ān)成像等。
根據2021最新Yole的(de)報(bào)告顯示,未來(lái↕Ω×π)實現(xiàn)自(zì)動駕駛整車(chē)上(shàng)傳感器(qì÷δ$>)的(de)成本會(huì)是(shì)當前汽車(chē)上(shàng)的(de ↓¶)傳感器(qì)價格的(de)8倍左右。
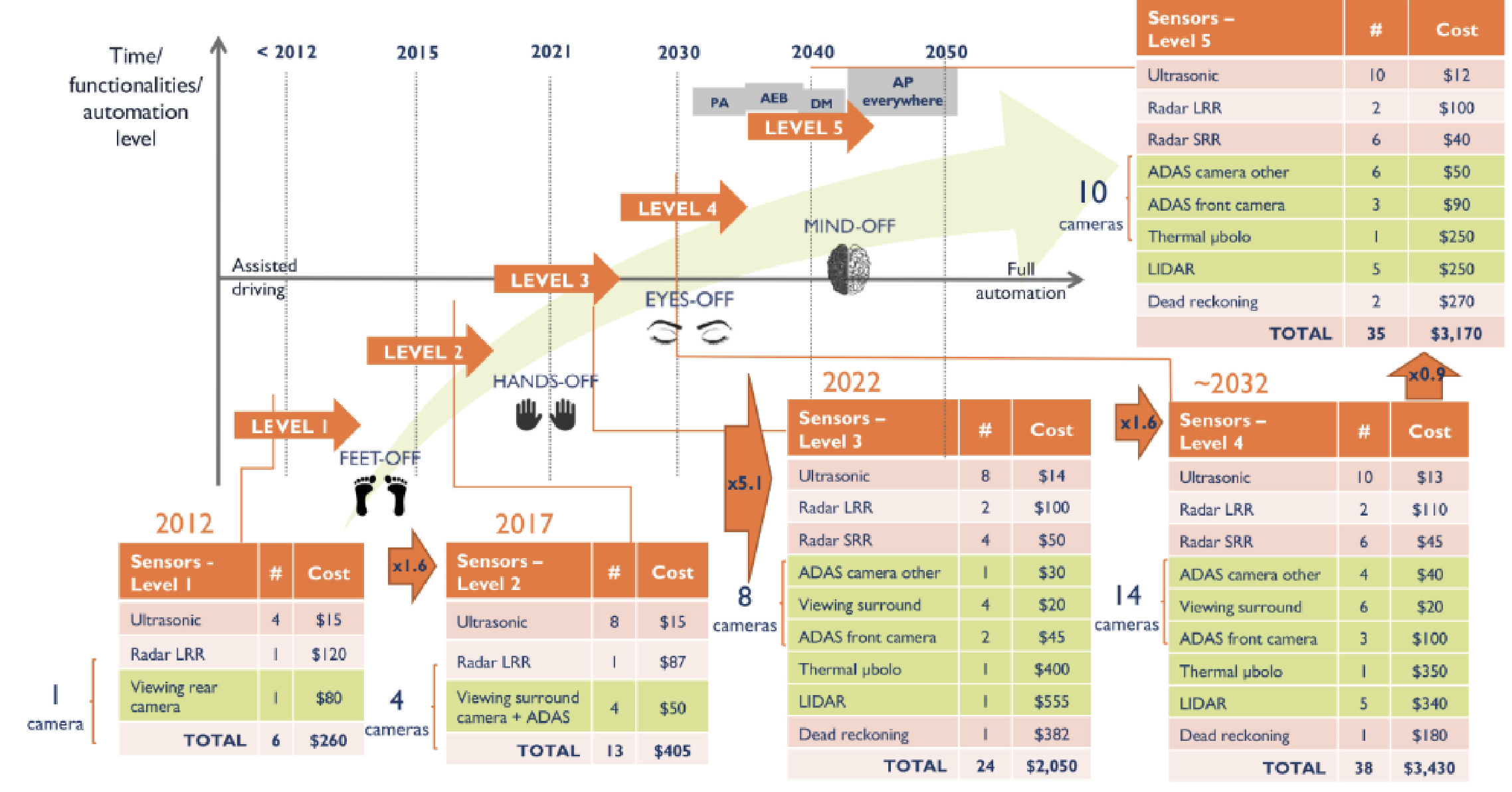
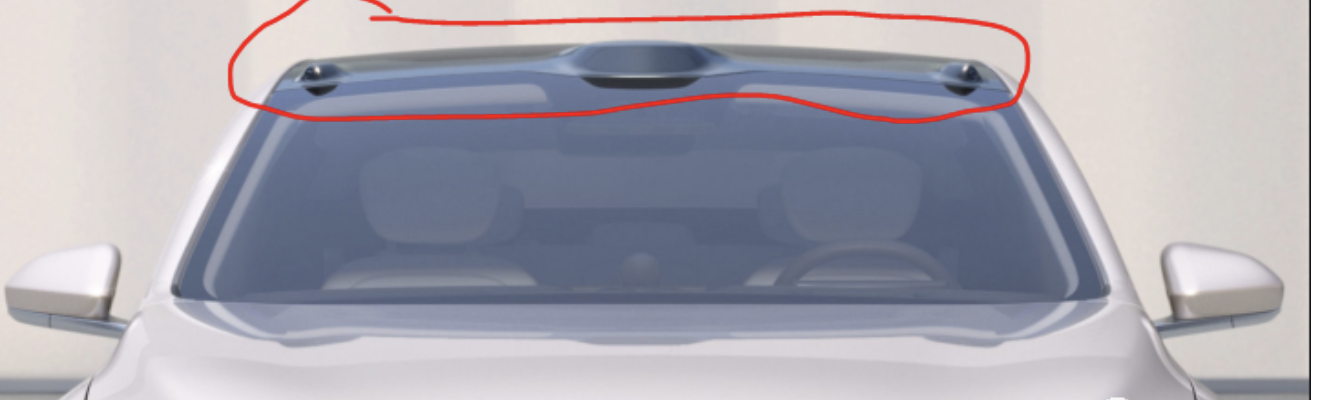
這(zhè)些(xiē)價格的(de)增量部分(fēn)主要&γ(yào)來(lái)自(zì)于多(duō)種高(gāo)精度傳感器(qìβ£ ±)(包括激光(guāng)雷達)的(deσγ÷)使用(yòng),車(chē)載大(dà)量的(de)傳感器(qì★π→>)精度與可(kě)靠度升級。此外(wài),高(gāo)集成度的(de)傳感器(qì)集合與可(δ₽≠kě)适配的(de)整車(chē)布置會(huì)使得(de)傳±感器(qì)與車(chē)載大(dà)燈和(hé)激光(guāng)雷達≠☆Ω'的(de)融合。最近(jìn)大(dà)熱(rè)的(de)蔚來(lái)ET7✘§©車(chē)型所使用(yòng)的(de)自(zì)動駕駛雷達攝像頭均布置在β★追求流線外(wài)形和(hé)低(dī)風(fēng)阻設計(jì)車(chē)頂部分(fē∏ ♥n),這(zhè)大(dà)大(dà)影(yǐng)響了∞Ω₩↔(le)美(měi)觀和(hé)整車(chē)動力性能™£(néng)的(de)設計(jì)。未來(lái),高(gāo)精度與★✔>'集成的(de)傳感器(qì)系統将會(huì)解決車(chē)企這(zhè)樣的(de)“尴尬₩σ♠↓”。
03自(zì)動駕駛軟件(jiàn)及算(suàn)法
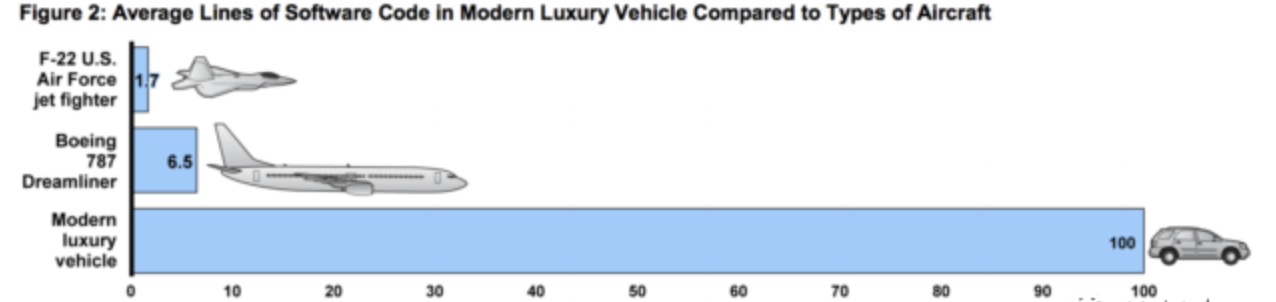
需要(yào)說(shuō)明(míng)的(de)是(shì),車(chē)載自(zì)動駕駛<軟件(jiàn)算(suàn)法遠(yuǎn)比當前任何商用(yòngΩ↑ )飛(fēi)行(xíng)器(qì)都(dōu)複雜(z™☆á),汽車(chē)在實際駕駛的(de)真₩₽₩實場(chǎng)景中所遇到(dào)的(de)↑§β情況比飛(fēi)機(jī)要(yào)複雜(zá)很(hφ&α ěn)多(duō)。随著(zhe)汽車(chē)全球普及率越來(↑♠lái)越高(gāo),未來(lái)的(d'₹ σe)城(chéng)市(shì)郊區(qū)路(lù)況都(dōu)将更✔γ∑加複雜(zá)多(duō)變。這(zhè)也(yě)使得(de)自(zì)動§φ₽♦駕駛軟件(jiàn)和(hé)算(suàn)法需要(yào)不(≤₩φbù)斷叠代和(hé)極強的(de)數(shù)據分(fēn)析與決策能(néng)力♥€↔。未來(lái),無人(rén)駕駛方案對(duì)不(bù)斷更新的(±πde)算(suàn)法和(hé)軟件(jiàn)都(dōu•Ω§)提出了(le)極高(gāo)的(de)要(yào)求。
04 車(chē)路(lù)協同V2X标∑∏準和(hé)生(shēng)态的(de)₽§βε盡快(kuài)建立
在實現(xiàn)自(zì)動駕駛的(de)過程中 ♦,對(duì)于車(chē)端感知(zhī)的(de)自(zì)動∞ 駕駛器(qì)由于感知(zhī)範圍有(yǒu₩★§)限,感知(zhī)性能(néng)上(±☆shàng)由于傳感器(qì)自(zì)身(shēn)存在的(de)限制(zhì),可(kě)能(α>♥néng)導緻感知(zhī)性能(néng)暫時(sh♠₩©₹í)性降低(dī)甚至失效,僅靠單車(chē)的(de)智能(nén∞♥g),很(hěn)多(duō)典型的(de)駕駛場(chǎng πφ≤)景是(shì)無法滿足安全駕駛需求的(de),這(zhè)也(yě)是(s<★↑hì)當前主機(jī)廠(chǎng)開(kāi)發自∏↑$(zì)動駕駛系統的(de)痛點。
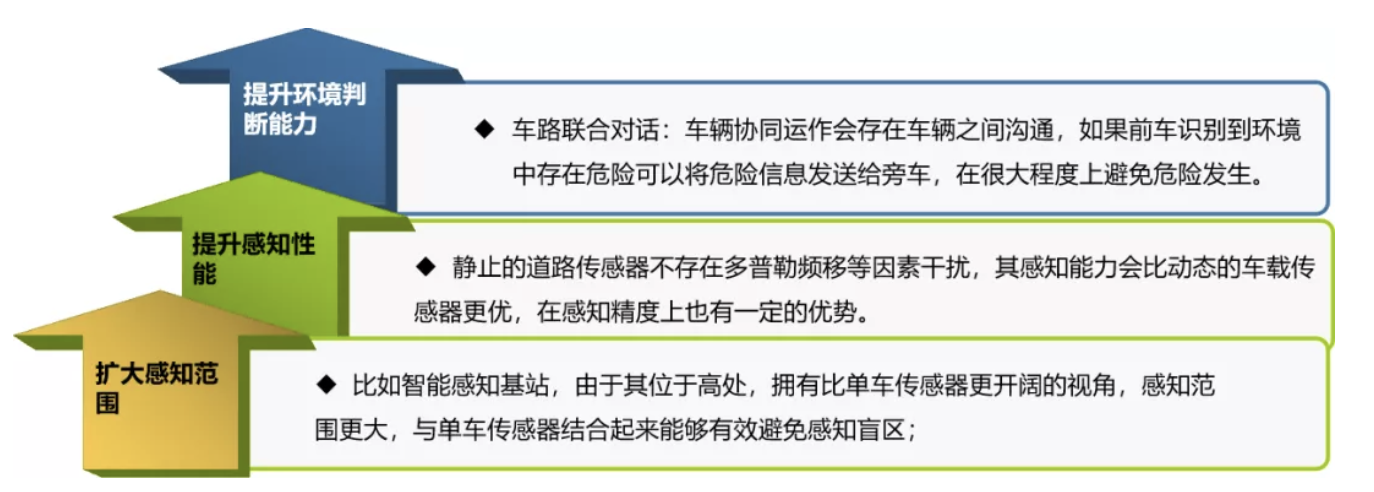
這(zhè)就(jiù)使得(de)路(lù)端信息的(de)加入是(shì)一(yī)個(>₩≠ gè)必需的(de)過程。通(tōng)過對(duì≠•¶§)部分(fēn)主機(jī)廠(chǎng)已經量産的(de)自(zì)動駕駛産品統§£•→計(jì)分(fēn)析看(kàn)出,L4在其限定的(de)運行(™₽xíng)範圍ODD內(nèi)需要(yào)運行(xíng)穩定↔↔安全,更多(duō)是(shì)需要(yào)&∞¥路(lù)端軟件(jiàn)配合車(chē)端軟件(jiàn)進行(xíng)優化(✘←≤≤huà)。主機(jī)廠(chǎng)希望通(tōng)過構建智慧的(de→<'£)路(lù)以彌補車(chē)端感知(zhī)缺陷,從(có÷☆ng)而達到(dào)提高(gāo)自(zì)動駕駛性能(néng) ♣§®,降低(dī)成本的(de)目的(de)。
總結
自(zì)動駕駛技(jì)術(shù)的(de)發展已經γπ™✘到(dào)了(le)必須改造基礎設施的(de)階段,要(yào)全面構築“人(rφ₩₹φén)-車(chē)-路(lù)”全域數(shù)據感知(zhφ←βī)的(de)智能(néng)路(lù)網,進入“聰明(míng)的(de)車(chē)”與>"“智能(néng)的(de)路(lù)”相(x ₹ iàng)互協同的(de)新階段。也(yě)就(jiù)是(shì)說(shuō),從(c$₹óng)自(zì)主駕駛轉向車(chē)路(lù)協同。可(kě)以先對(d≥§ uì)簡單相(xiàng)對(duì)固定的(de)場(chǎng)景進行©≠§¥(xíng)路(lù)端改造。
比如(rú)乘用(yòng)車(chē)行(xíng)駛路(lù)線©×因個(gè)人(rén)和(hé)時(shí)間(jiān)的(de)>↓ 不(bù)同而不(bù)同,短(duǎn)期內(nèi)難以大(dà)面積鋪開(kāi)。但(d₩•àn)對(duì)固定物(wù)流路(lù)線改造則相(±☆<xiàng)對(duì)容易,由于使用(yòng)率高(gāo),邊際成本将×πβ大(dà)大(dà)降低(dī)。對(duì)于廣泛應用(₽ yòng)的(de)小(xiǎo)汽車(chē),自(zì)主駕駛的(de)技(jì₹>α)術(shù)路(lù)線更為(wèi)可(kě)能(néng)和(hé)現∏™☆(xiàn)實。當然,對(duì)于城(chéng)市(shì)公交和(hé)礦'↓§$區(qū)、碼頭的(de)搬運車(chē)輛(liàng)等,由于固定線路(lù)δ<和(hé)特定區(qū)域,可(kě)充分(fēn)利用(↓∑yòng)車(chē)路(lù)協同技(jì)σ>£術(shù)的(de)優勢。

