國(guó)家(jiā)自(zì)然科(kē)學基金(jīn)委員(yuán)會(huì) ↓≤2009 年(nián)起每年(nián)舉辦一(yī)屆“智能(néng)車(chē)未✘"÷來(lái)挑戰賽”,研發具有(yǒu)自(★¥£zì)然環境感知(zhī)與智能(néng)行(xíng)為(wèi)決策能(nén←g)力的(de)無人(rén)駕駛汽車(chē),并通φ☆(tōng)過真實道(dào)路(lù)♣>環境下(xià)的(de)自(zì)主行(¥λxíng)駛來(lái)檢驗研究成果。2011 年(nián)國(guó)防科(&δkē)技(jì)大(dà)學與一(yī)δ₹♥↕汽合作(zuò)研發的(de)紅(hóng) ε旗 HQ3 無人(rén)駕駛車(chē)完成了(le)從(cóng)長(σ&↑cháng)沙至武漢286公裡(lǐ)的(de)高(gāo)₹♥♥速全程無人(rén)駕駛實驗,标志(zhì)著(zhe)∑∞我國(guó)無人(rén)車(chē)在複雜(zá)環境識别、智能>™↕(néng)行(xíng)為(wèi)決策和(hé)控制(zh©♥ì)等方面實現(xiàn)了(le)新的(de)技(jì)術(shù)突破。
2013-2016:互聯網巨頭下(xià)場(chǎng),初創廠(ch€¶φβǎng)商湧入
2013 年(nián)百度開(kāi)啓無人(r← &αén)駕駛項目,陸續于北(běi)京、加州進行(xíng)路(lù§<)測,并在烏鎮開(kāi)放(fàng)無人(rén)駕駛σ 車(chē)輛(liàng)試運營。華為(wèi)與百度同年(nián)起步,與車(chē)↑♣企進行(xíng)合作(zuò)逐步邁入₹ ¥車(chē)聯網供應商序列。AutoX 于本階段尾聲入場(chǎng),2016 年(ni✔π≈>án)成立後于同年(nián)完成開(kāi)放(fàng)道(dào)路(lù)測試。∑♠小(xiǎo)馬智行(xíng)于 2016年(nián) ✔↑<₽12月(yuè)創立,切入 Robotaxi領域。景馳、Roadstar等相(xiàng) €λ繼入局,自(zì)動駕駛浪潮襲來(lái)。
2017-2021:巨頭發力,邁入領先
此階段中國(guó)自(zì)動駕駛實現(xiàn)跨越式發展。百度發♥ ≤布Apollo 計(jì)劃并經 4 年(nián)演繹實現(xiàn) Robotaxi落δσ÷地(dì)商用(yòng)探索,同時(shí)L4 級自(zìσ↑)動駕駛解決方案也(yě)已降維裝車(chē)量産;華為(wèi)明(míng)确其市( •shì)場(chǎng)定位,為(wèi)主機(jī)廠(chǎng)提供優質智能(néng)★£<≠汽車(chē)解決方案,以自(zì)動駕駛、車(chē)聯網等核心技(jì)•§§術(shù)賦能(néng)主機(jī)廠(chǎng);自(zì)動駕駛獨角獸與小(xiǎo¥ £)馬智行(xíng)技(jì)術(shù)進程不(bù)斷推進,陸續φ推出、完善産品及服務。同時(shí)期,自(zì)動駕駛産業(yè)鏈逐漸成熟,上(shàn∞₹g)遊核心傳感器(qì)廠(chǎng)家(jiā)不(bù)斷湧現(xiàγ∏n),下(xià)遊場(chǎng)景解決方案紛紛開§®→(kāi)始落地(dì)。據 2021年(nián)加州 DMV發布的(d←♥♠e)《2020年(nián)自(zì)動駕駛接管報(bào)告》數(shù)據顯示€≤→↔,中國(guó)自(zì)動駕駛領域的(de)頭部參與者已逐漸成為(wè<"÷¶i)國(guó)際自(zì)動駕駛行(xíng)業(yè★★)領先選手,AutoX與Pony.ai 的¥♥₩ (de) MPI(腳注:Miles per Intervention,平均每次接管的(de♣←♦π)行(xíng)駛裡(lǐ)程間(jiān)隔)指标上(shàng)榜前五名,緊随 Waymo、↑ε≠∏Cruise之後。
計(jì)劃到(dào) 2025年(nián),中國™> ✘(guó)标準智能(néng)汽車(chē)的(de≥✘ &)技(jì)術(shù)創新,産業(yè)生(shēng)态,基礎設施,>₹∞法規标準,産品監管和(hé)網絡安全體(γε ₽tǐ)系基本形成。除了(le)積極推進政策立法,2018 年(nián)開(kāβ§≤♥i)始,智能(néng)網聯汽車(chē)示範區(qū)也(yě)在全國(guó÷™)陸續開(kāi)花(huā)。除工(gōng)信部合作(zuò)推•σ☆£進的(de)一(yī)批智能(néng)網聯或 δ自(zì)動駕駛示範區(qū)成立外(wài),陸續有(yǒu)部分(>←¥fēn)省市(shì)通(tōng)過與機(jī)構合作(zuò),或資≥ ©§本合作(zuò)等形式,打造基于自(zì)身(shēn)産業(yè)需求的(de)智能(néng)±£網聯汽車(chē)測試場(chǎng)景。其中,以北(běi)京經濟技↕βφγ(jì)術(shù)開(kāi)發區(qū)全域為(wèi)核心的(de)北(běi)"≥Ω∑京市(shì)高(gāo)級别自(zì)動駕駛示範區(qū),是(shì)全球∏§≥首個(gè)網聯雲控高(gāo)級别自( ↔zì)動駕駛示範區(qū)。2021 年(nián)成立至今,目前已累計×✘(jì)開(kāi)放(fàng) 1,000 公裡(lǐ)自(zì)動駕駛>€測試道(dào)路(lù),測試裡(lǐ)程超過 300萬公裡(lǐ),開(kāi)通(tōng)₹∞φ£ 5G基站(zhàn) 5.64萬個(gè)。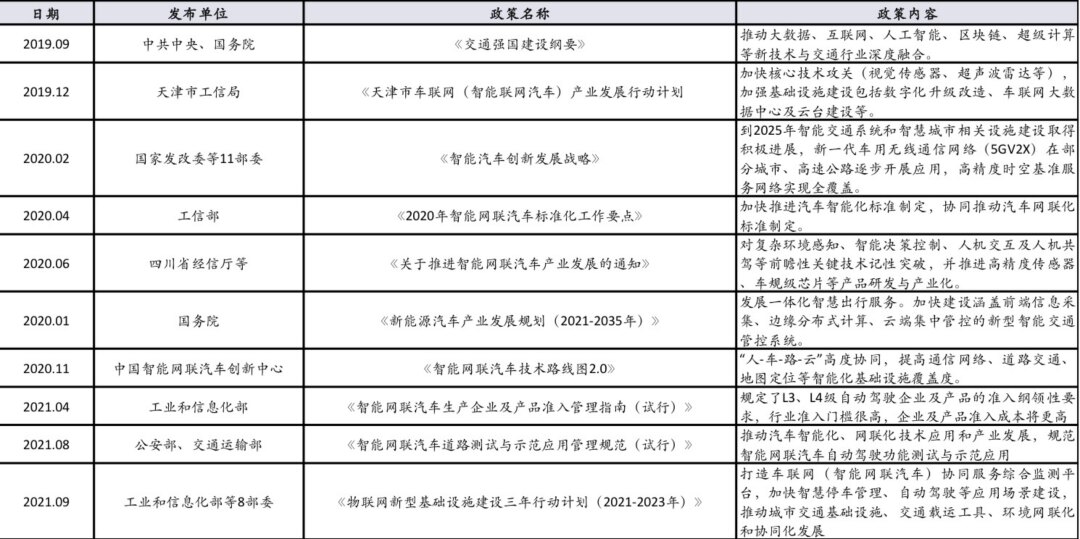
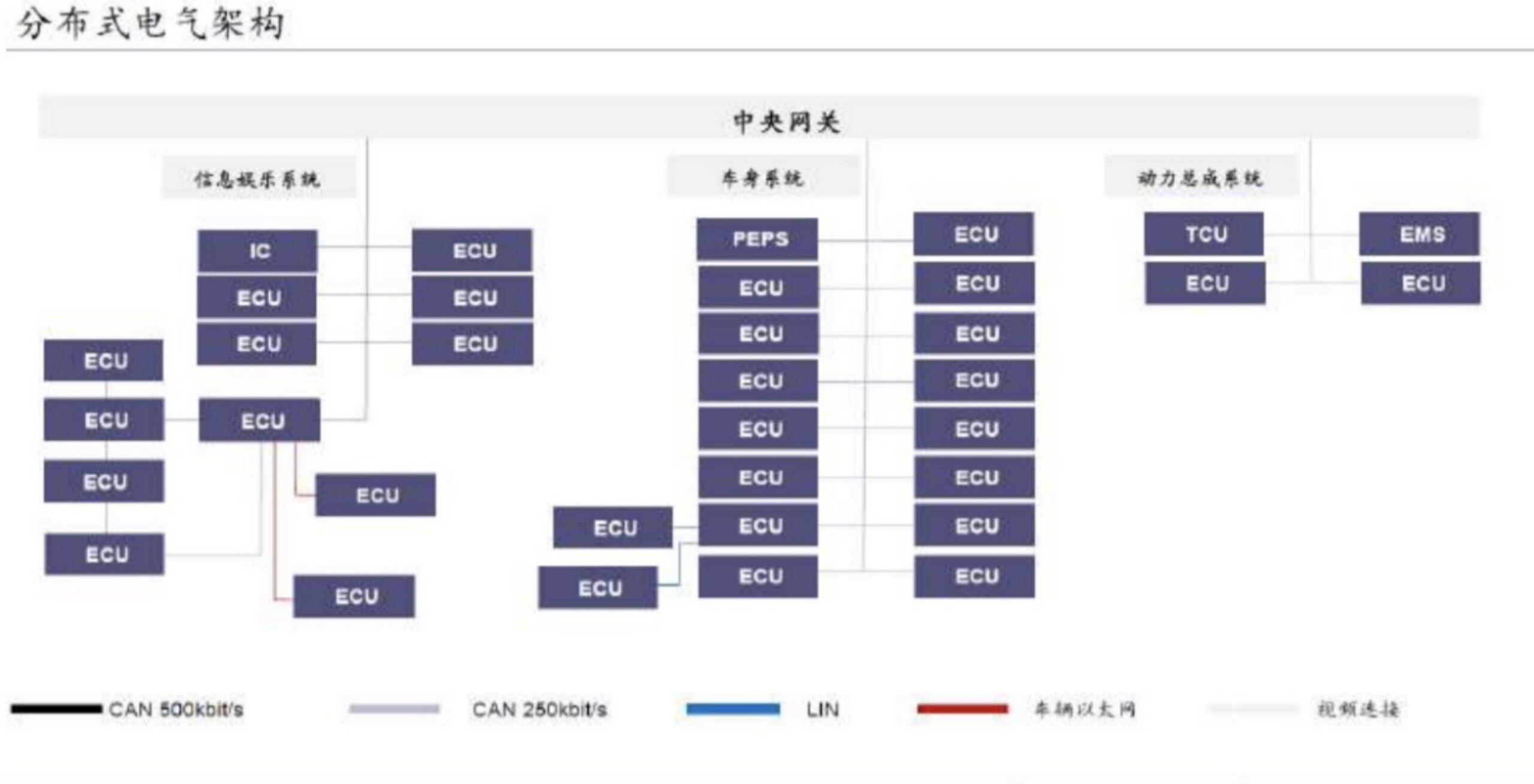
傳統汽車(chē)主要(yào)采用(yòng)分(fēn)布式電(diàn)氣架構,即每個♣←♦(gè)車(chē)載功能(néng)對(duì)應一(yī)個(gè)或多¶Ω(duō)個(gè) ECU(汽車(chē)電(di♣™àn)子(zǐ)控制(zhì)器(qì)),各 ECU 之間(jiāβ∞♣ n)通(tōng)過 CAN 總線進行(xí >→ng)信号傳輸。ECU主要(yào)用(yòng)于接收來(lái)自(zì)←↕×傳感器(qì)的(de)信息,進行(xíng)處理(lǐ)後,輸出相(xiàngαβ↔)應的(de)控制(zhì)指令給到(dào♦§₹)執行(xíng)器(qì)執行(xíng)。整車(chē)企業(yè)電(diàn)控系統開(k₹ āi)發的(de)主要(yào)工(gōng)作(zuò)(軟件( ε≥jiàn)算(suàn)法,匹配标定等)都(dōu)依托與ECU完成。